





 от ГК Росатом")













Приветствую.
Буду собирать 3d-принтер на базе scara-робота.
Сперва сам проект:
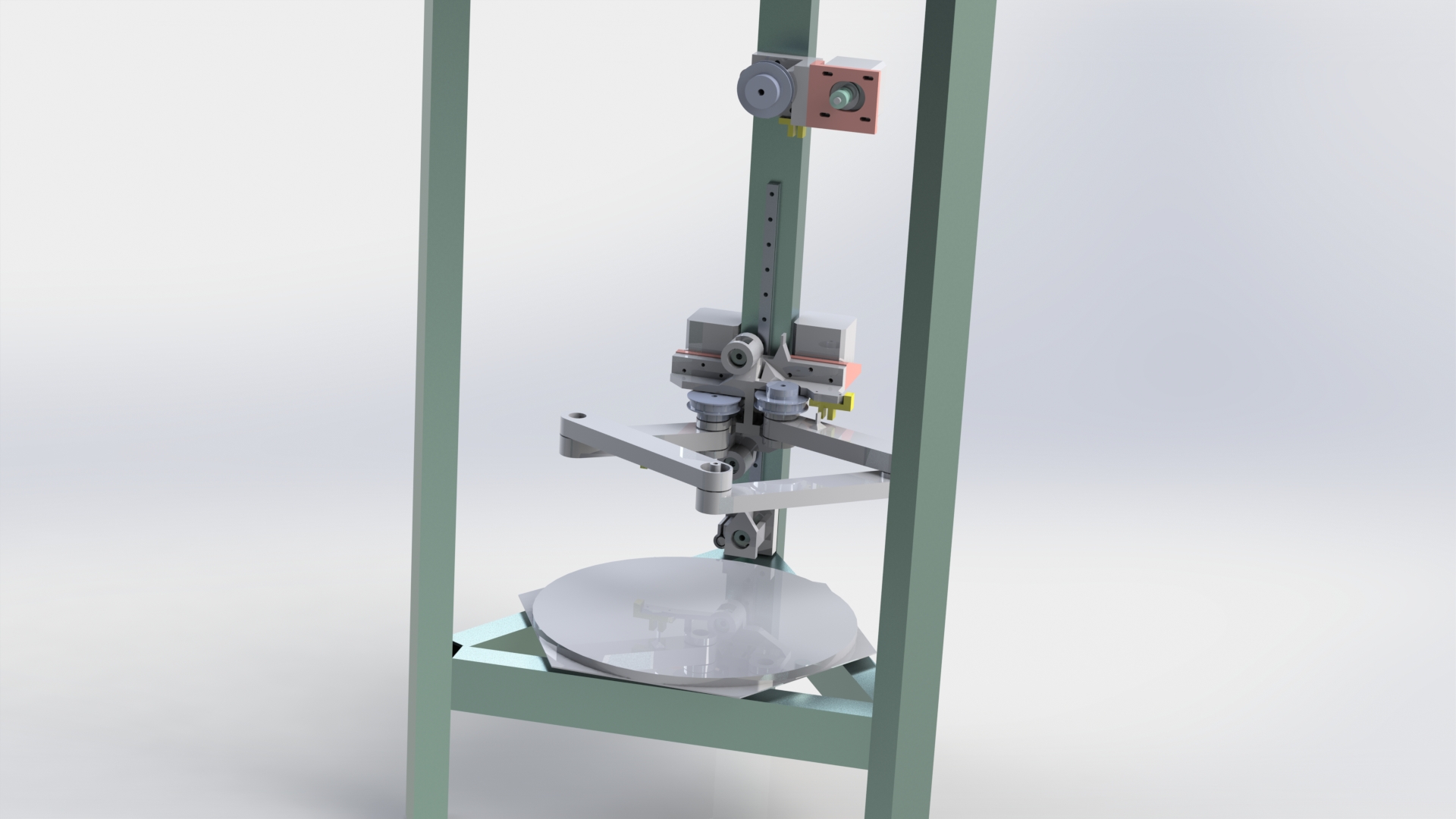
Почему все именно так, а ни как иначе?
Хотелось собрать в максимально быстрые сроки работоспособный прототип с минимальными трудозатратами и без доп.закупок.
Получился такой максимально простой вариант принтера из всего что у меня есть в наличии:
- Рама от дельта-робота
- Одна люфтящая рельса для вертикального перемещения
- Заводские шкивы для редукторов
- Множество подшипников для всего и вся
Раз проект готов, можно и напечатать это все и попробовать собрать сий агрегат…
Пока все печатается, подготовим раму, а именно прикрутим рельсу:
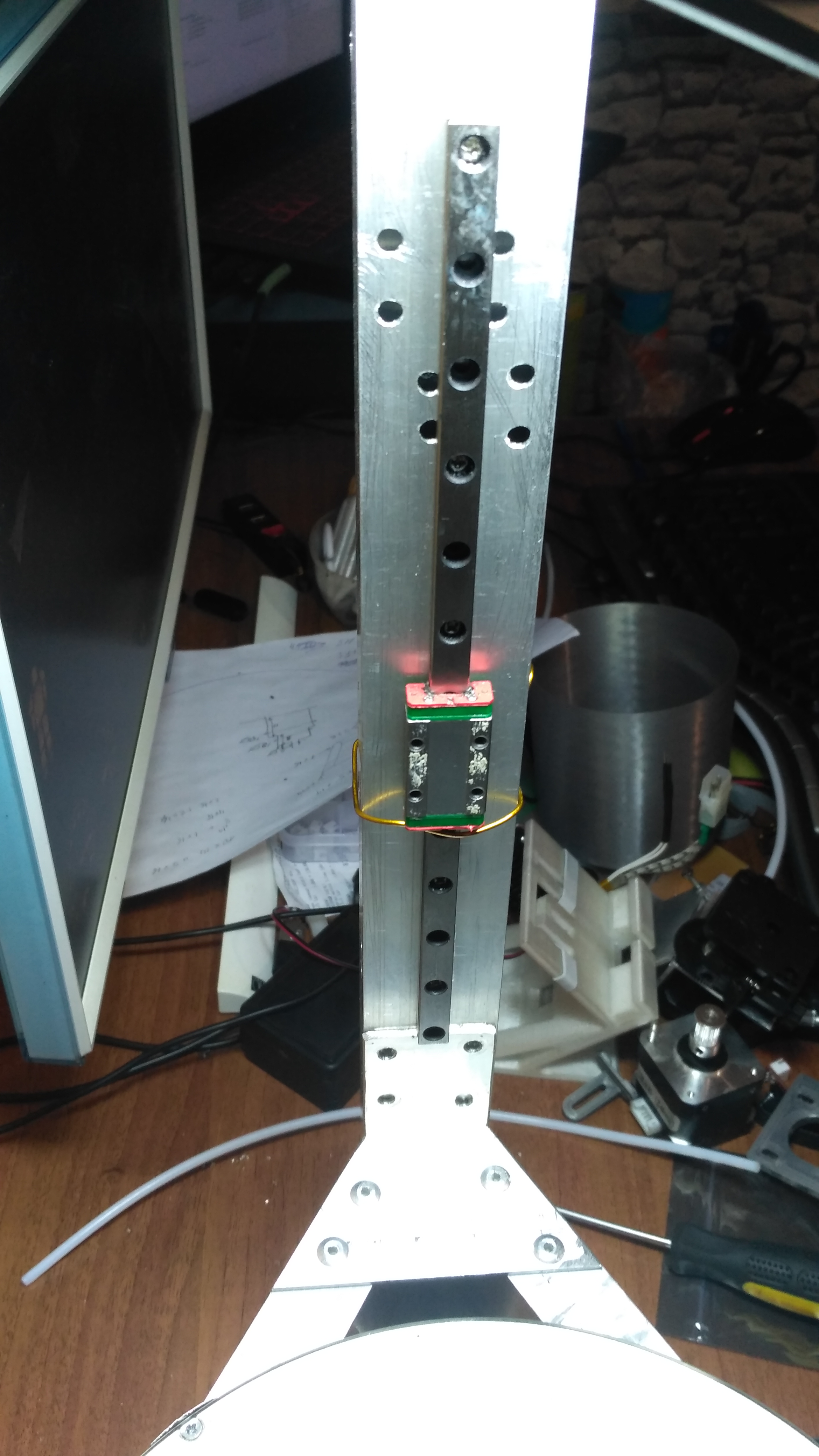
И нет, рельса держится не за счет проволоки )))
А пока рельса прикручивалась, «база» отпечаталась (вместе с 8-мью подшипниками и оптическими концевиками):

Следующие на очереди «inner arms» в количестве 2-ух штук (они близнецы, поэтому на фото лишь один из них):

С одной стороны запрессовывается болт, а с другой — устанавливается вал, который фиксируется так же как и в шкивах — винтиком.
Флажок для концевика первоначально печатался вместе с этой деталью, но ничего с ним не вышло. Пришлось заменить колхозом.
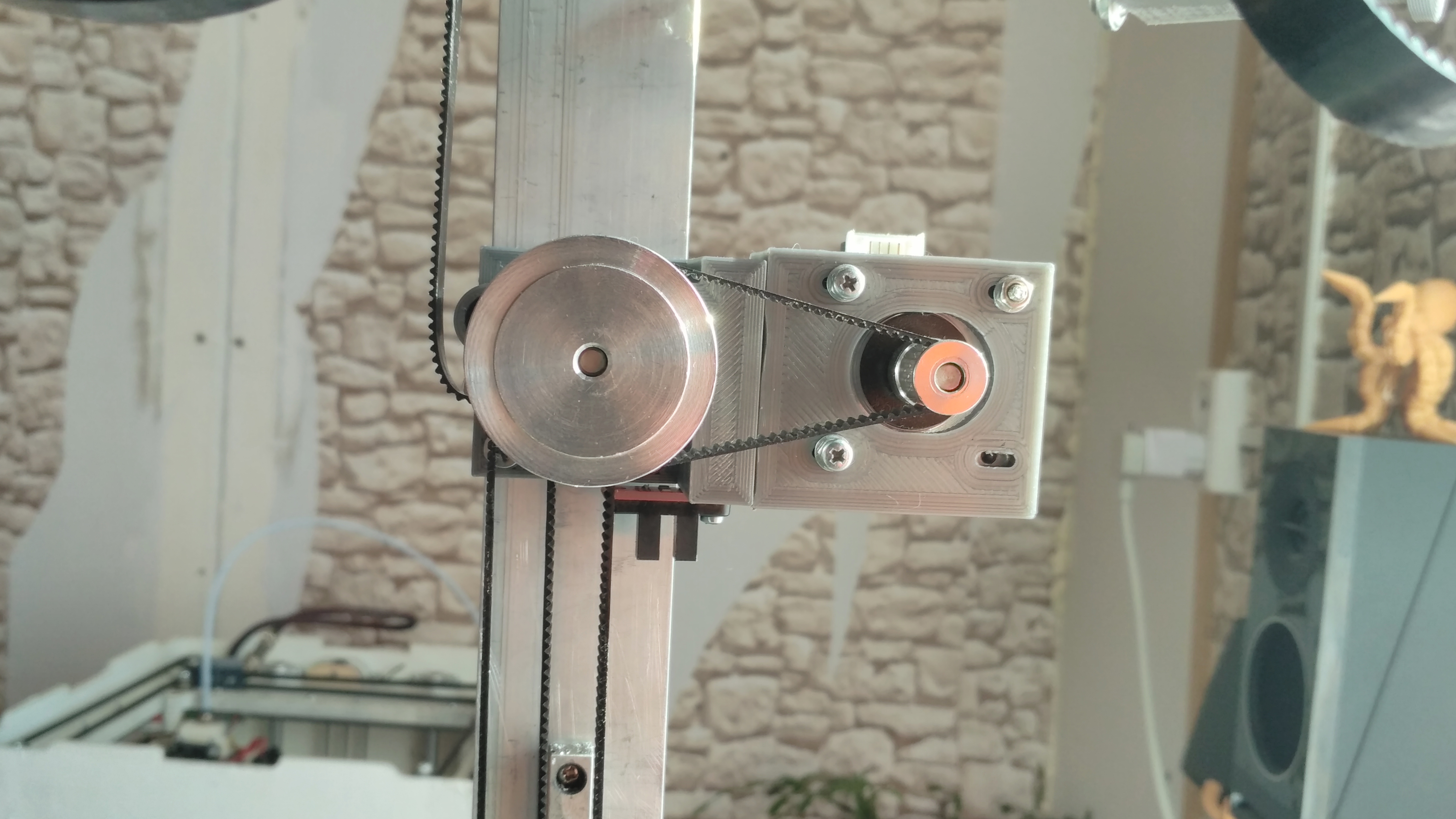
И раз они уже готовы, то сразу их и установим:

Один шкив установлен неверно и не накинуты ремни, позже я пойму ошибку и все исправлю. А теперь встречайте «outer arm»ы:
 Эти руки соединяются с предыдущими, через пары подшипников. А между собой — через один подшипник.
Эти руки соединяются с предыдущими, через пары подшипников. А между собой — через один подшипник.
Прикрутим эти руки к тем рукам, а потом то что получилось — прикрутим к рельсе:

Уже выглядит неплохо. Осталось немного. На очереди крепления для ремня на ось Z:

Ничего особенного вроде нет. Давайте сразу и установим их и еще ремень натянем:

И прикрутим уже все остальное, а именно (два мотора для привода рук, хотенд), так же подсоединим все проводочки:

А попытаюсь заставить ее шевелиться в следующий раз…





